ESA were tasked with upgrading a manual assembly station to a fully automated process, improving efficiency while maintaining safe operation.
The existing station relied on manual processes for key assembly steps, limiting productivity and increasing cycle times.
The client required a fully automated solution to:
The goal was to significantly reduce cycle time while ensuring safe integration into the existing production line.
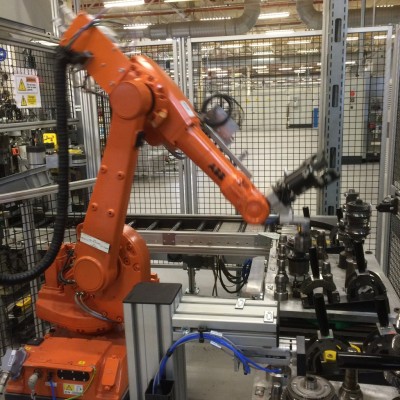
ESA designed and implemented a robotic solution using an ABB IRB1600 robot, equipped with a custom multi-purpose gripper.
The system was developed to handle multiple tasks within a single automated cycle, including:
To support automation, the assembly line pallets were modified to allow consistent part presentation for robotic pickup.


Introducing robotics into the station required a complete review of existing safety measures.
ESA carried out a full risk assessment and implemented:
The system was designed to safely switch between automatic and manual operation when required.
Through detailed process analysis and FMEA studies, ESA identified opportunities to streamline the operation.
A key improvement was the development of a multi-purpose gripper, which:
Additional handling systems were introduced to position bearing stacks for accurate and repeatable placement.

The Outcome
A1, Penrhyn Court Penrhyn Road Knowsley Business Park Prescot L34 9AB
Phone: +44 (0)151 480 1155 · Email: info@esa-uk.co.uk
Opening hours: Monday to Friday, 08:00 – 16:30
Website designed & developed by Ident Creative Ltd